GPS-tekniken blir i allmänhet allt mer tillgänglig, men för lantbruket tar de stora drakarna fortfarande bra betalt för teknik som egentligen är ganska enkel.
För att bestämma korrekt position inom 2 cm repeterbart år efter år behövs en lokal referenssignal, gärna inom en mil från arbetsplatsen. Dataväxt, Lantmäteriet och andra aktörer tillhandahåller abonnemang för korrektionssignaler, men det är relativt enkelt och billigt att bygga en egen basstation som skickar korrektionssignal över internet till maskinen, förutsatt att mottagaren har stöd för NTRIP. För detta finns gratistjänster som rtk2go, där motkravet för att använda tjänsten är att korrektionsdata delas publikt med övriga användare. Har man riktig tur finns det redan någon i närheten som delar sin korrektionsström där. I skrivande stund är det dock ganska glest mellan de svenska stationerna.
Mottagare
För att åstadkomma detta smidigt finns öppen mjukvara vid namn RTKBase som går att installera på exempelvis en raspberry pi. RTKBase tillhandahåller en webbserver för inställningar och status för basstationen
Jag byggde min basstation av följande delar:
- Antenn – u-blox ANN-MB1-00
- GPS-mottagare – u-blox ZED-F9P
- Dator för RTKBase (inställningar, drift, NTRIP) – Raspberry Pi (valfri modell)
- Diverse kablar – u.fl till SMA (Om man väljer ett mottagarkort med SMA-kontakt behövs ingen)
- Diverse kablar – USB-A till USB-C för anslutning av GPS-mottagare till Raspberry Pi
- Micro-USB nätadapter för strömförsörjning
- Inkapsling, jag 3D-skrev min (STL-filer)
Med alla delar monterade:


För att installera RTKBase på raspberry pi är det enklast att sätta microSD-kortet i en dator, ladda ner och packa upp zip-filen. Däri finns en imagefil som kan skrivas till SD-kortet.
Om du ansluter raspberry pi till internet med ethernet-kabel via router behöver du oftast inte göra mer än sätta i SD-kortet och strömsätta raspberry pi. Om du ansluter raspberry pi till internet via trådlöst nätverk behöver detta konfigureras först. Enklast är att göra detta med microSD-kortet fortfarande i en dator såhär.
Antenn
För att få bra signalkvalitet måste antennen placeras så att den inte har något som skymmer himlen. Kompromissa inte med detta, det kan se ut som att det fungerar men signalkvalitén kommer inte vara tillräckligt bra för att nå precisionen vi vill ha. Jag monterade min på taket ovanför tv-antennen.

Det är också viktigt att montera antennen på rätt håll, då dessa antenner inte har samma försärkning i alla riktningar. Detta framgår av antennens antenndiagram, vilket återfinns i antennens datablad, kapitel 6.3. Där ser vi att vi ska montera antennen med undersidan neråt, för signaler underifrån får dålig försärkning.
Inställningar
Navigera till RTKBase i din webbläsare, ofta finns denna på basegnss.local, men ibland kan man behöva leta upp raspberry pis IP-address på adminsidan för din router.
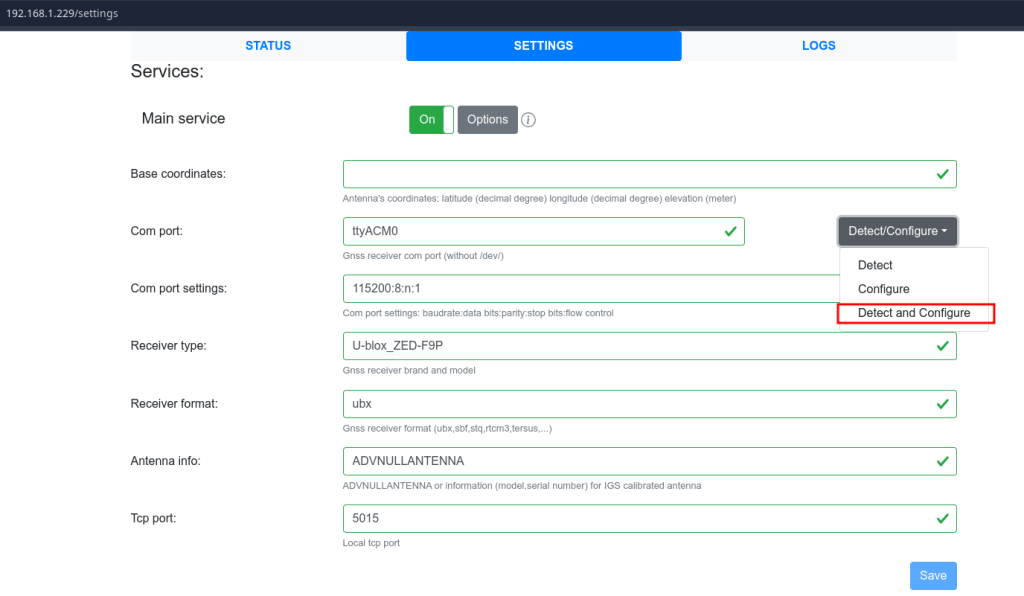
Därefter går man till “settings” och kör autokonfiguration av GPS-mottagaren:
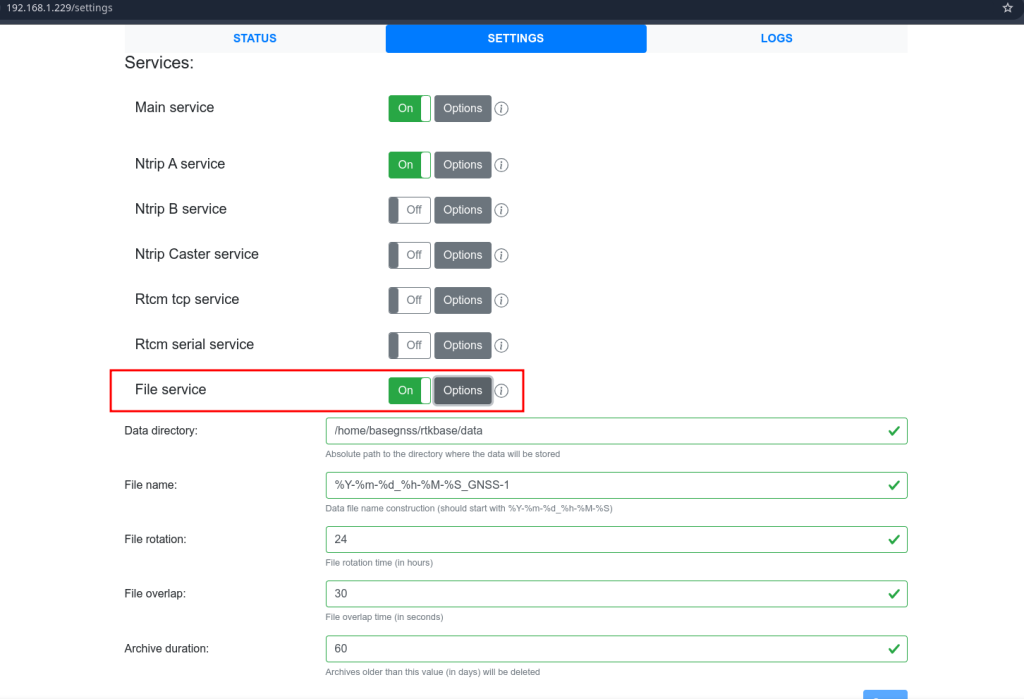
För att bestämma basstationens position “Base coordinates” behöver vi efterberäkna basstationens satellitobservationer mot en känd referensstations, se längre ner på sidan under rubriken “Bestämning av basstationens position”. För att kunna göra efterberäkningar behöver vi spara ner vår basstations satellitobservationer till såkallade dygnsfiler, som innehåller alla observationer för ett dygn åt gången. För att konfigurera inspelning är det bara att starta “File service”:
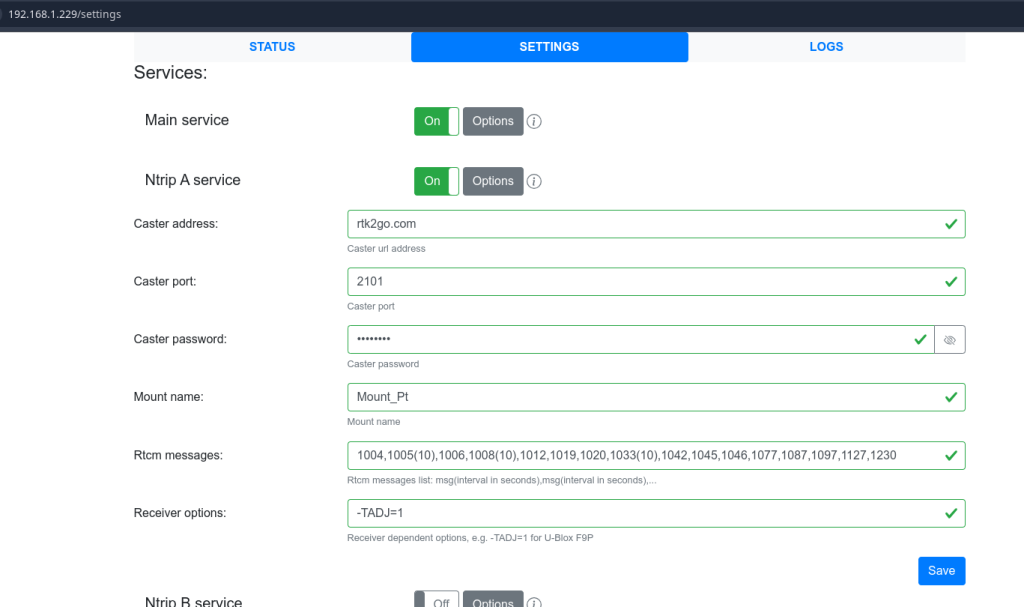
När vi bestämt vår basstations position är det slutligen dags att ställa in delning av korrektionsströmmen över NTRIP. Till att börja med reserverar man en ny basstation. Namnet på basstationen kallas MountPoint, och är det namn du använder för att referera till korrektionsströmmen från just din basstation. Därefter fyller man i inställningar för NTRIP-casting:
Bestämning av basstationens position
För att korrektionsmeddelandena ska ge absolut noggrannhet måste vi bestämma vår nya basstations position. För att åstadkomma detta kan man använda Lantmäteriets nätverk av referenstationer, swepos. Så kallade dygnsfiler är gratis att använda, men man måste registrera ett användarkonto. Därefter går det att ladda ned rinex-filer som innehåller satellitobservationer under ett dygn. Dessa kombineras med observationerna från vår egen basstation i ett efterberäkningsprogram och ut får vi vår egen position relativt basstationen. Eftersom Lantmäteriets basstationer är exakt positionerade blir vår egen det också. Detta är samma process som används när vi positionerar i fält, men då sker den live, inte i efterhand.
Jag har skapat ett litet verktyg för att automatiskt hämta observationer från RTKBase, motsvarande observationer från valfri Swepos referensstation och utföra efterberäkning. Det kan användas både för initial positionering och löpande övervakning.
Slutligen
Detta är en ganska kortfattad guide, som i skrivande stund nog förutsätter viss vana. Skriv gärna en kommentar om det är något steg jag borde förklara bättre.
Terminologi
GNSS – Global Navigation Satellite System
RTK – Real-Time Kinematic
GPS – Global Positioning System
NTRIP – Networked Transport of RTCM via Internet Protocol
RTCM – Radio Technical Commission for Maritime services
Leave a Reply